Concept:
This build is more of an experiment to see what I can do building a pair of robot legs where the lower legs are pneumatic cylinders that can be used for jumping, hence the 'Athlete' name.
Also, the thighs will include a suspension system to ease the impact on the servo motors and the rest of the equipment.
As with the droid build, I had some steel brackets left over from my first attempt at a robot build, and repurposed them for this robot build.

------------------------------------
Suspension:
I had to create a system that can move in the Z-Axis direction, i.e. impact reduction, while maintain stability in the Y- and X-Axis so the legs are not floppy
Here is one part of the bracket meant to hold the the suspension; the holes on either side are the welding points for the stability rods - did not have a big enough drill bit so I had to rasp the hole big enough to fit the rods.

Suspension system assembled. Now you can see how the stability rods move in the Z-direction while keeping rigidity in the other directions where the suspension hinges.


------------------------------------
Pneumatic System:
Here, I have built the hip area where I mounted the power sources (+12VDC for the pneumatic pump and solenoids and +24VDC for the servo motors). Above the power sources is the pneumatic pump (right) and the air tank (left).


------------------------------------
Assembly:
I've put together the legs, pneumatic cylinders and built the platform for the microcontroller above the pump and tank.
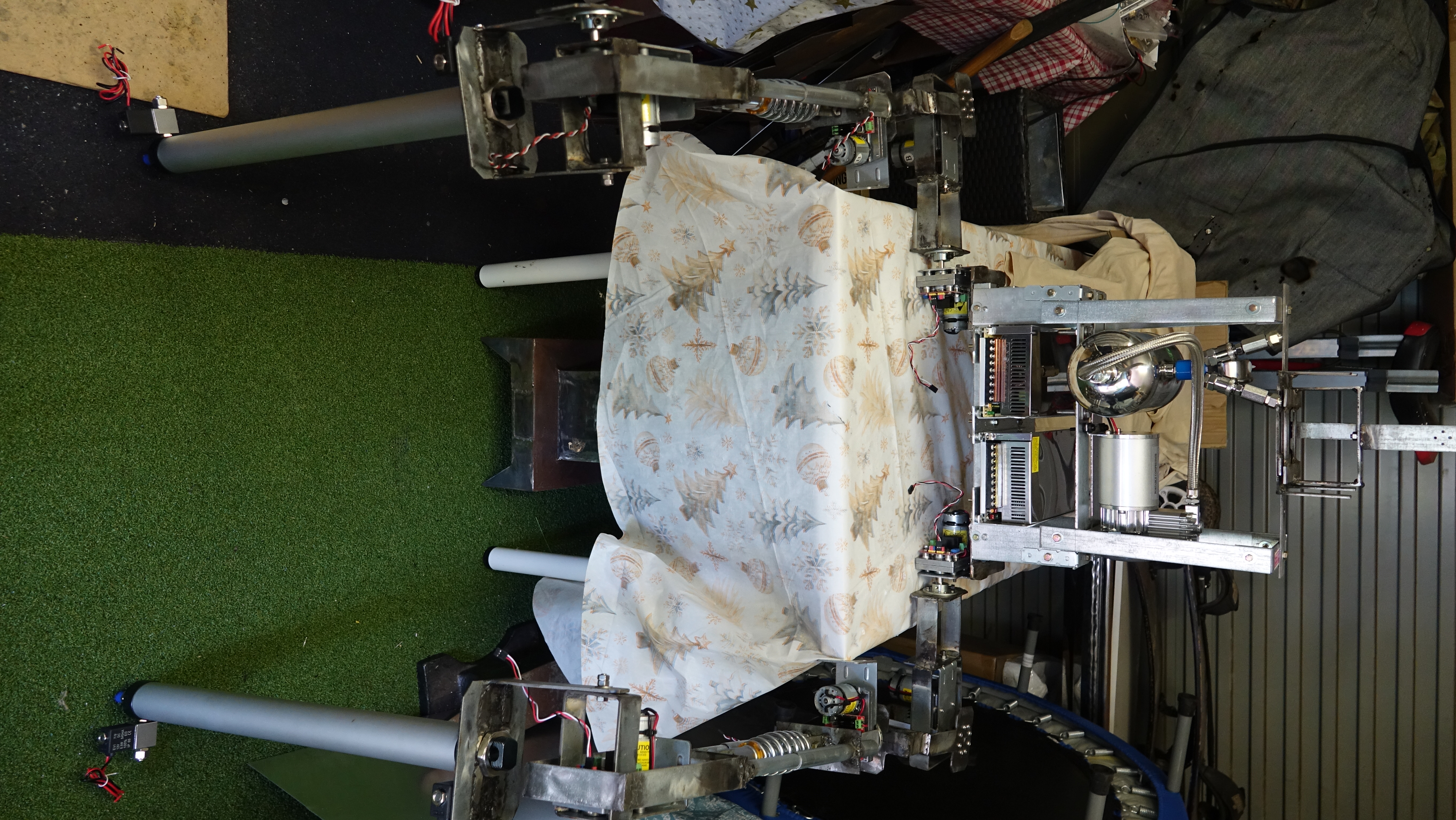



Added the wires for the servo motors and the pneumatic solenoids.

------------------------------------
BAATSHEBA(TM) Copyright(C) Marthinus Botha 2024