
Previous Build:
These are the remnants of my first robot build, used with basic warehouse-bought steel that has been cut and welded into structures to hold highly powerful servo motors. This first project was started to help me learn and pick-up skillsets in the areas of robotics, electronics, electrical, coding and steel working (grinding and welding, etc.). I never finished the project, but I did learn a great deal from it, which allowed me to create Baatsheba's Domestic Form with an improved thought process and knowledge base. However, now with this Droid Build project, I can easily re-purpose the motors and steel limbs. Luckily, I had enough foresight to build these steel limbs in a modular way, i.e., I can mix-and-match how I want.
These are the shoulders of the prvious build. They can stay as they are. I'm just going to add an extra set of servo motors to create a bicep rotation and then attach the elbow servo motor. I will re-purpose the upper legs for the prvious robot as the lower arms for this droid build.


------------------------------------
Tools:
These were the tools I used.


------------------------------------
Steel Droid Arms:
Here are the re-purposed arms. All I had to do was drill a few holes, other that that, the previous build provided enough flexibility in the steel 'modules'. The smaller steel pieces with the smaller servos attached are for the end-effector, which I'm still yet to decide on.

------------------------------------
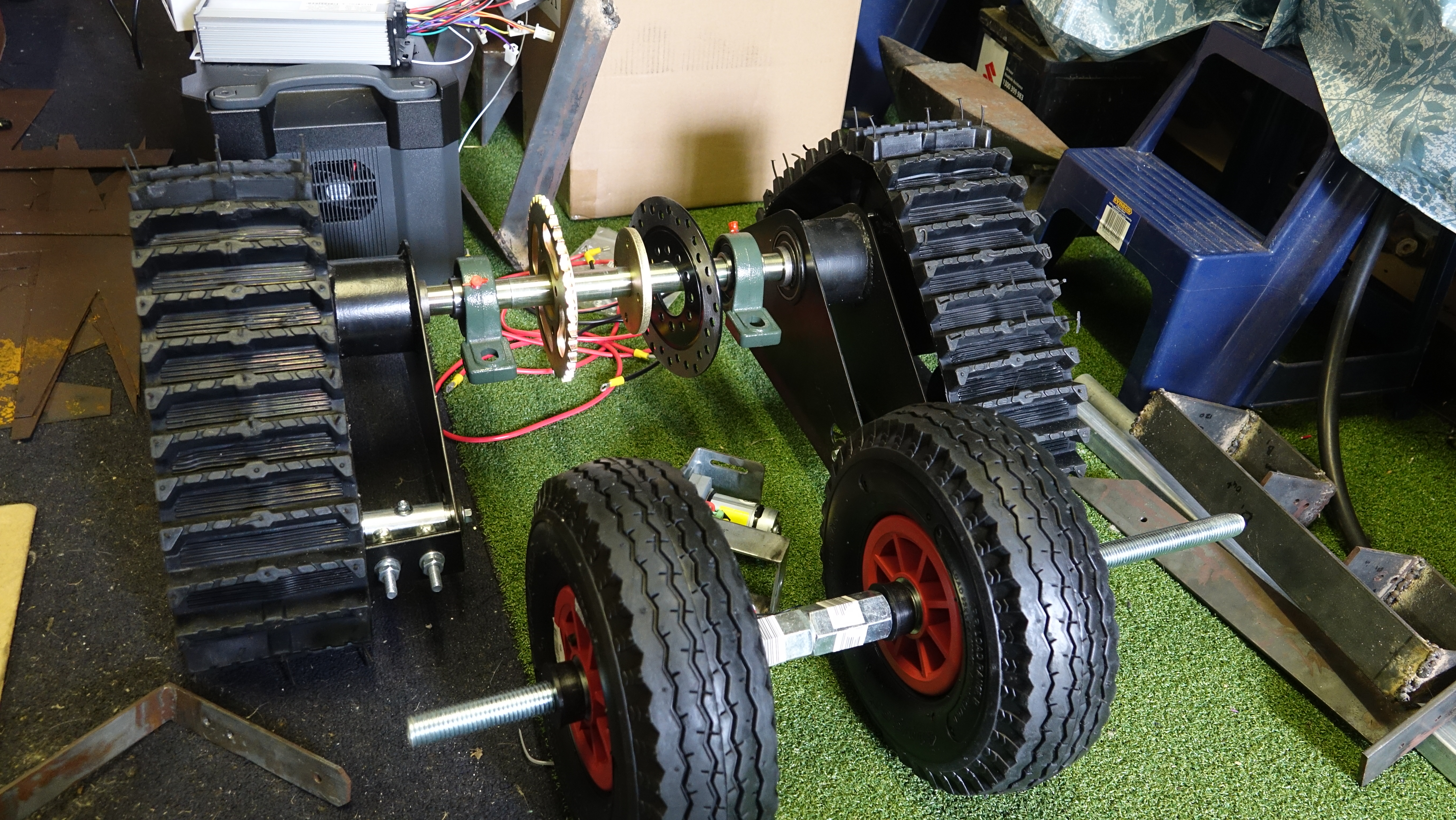
Caterpillar Tracks:
These are the caterpillar tracks for the rear wheels. The electric motor will be chained to the sprocket for locomotion.


Here, the front wheels are shown. A shaft will be welded to the nut in the middle and attach to a servo motor for steering.
------------------------------------
Droid Chassis:
Me starting on the chassis.

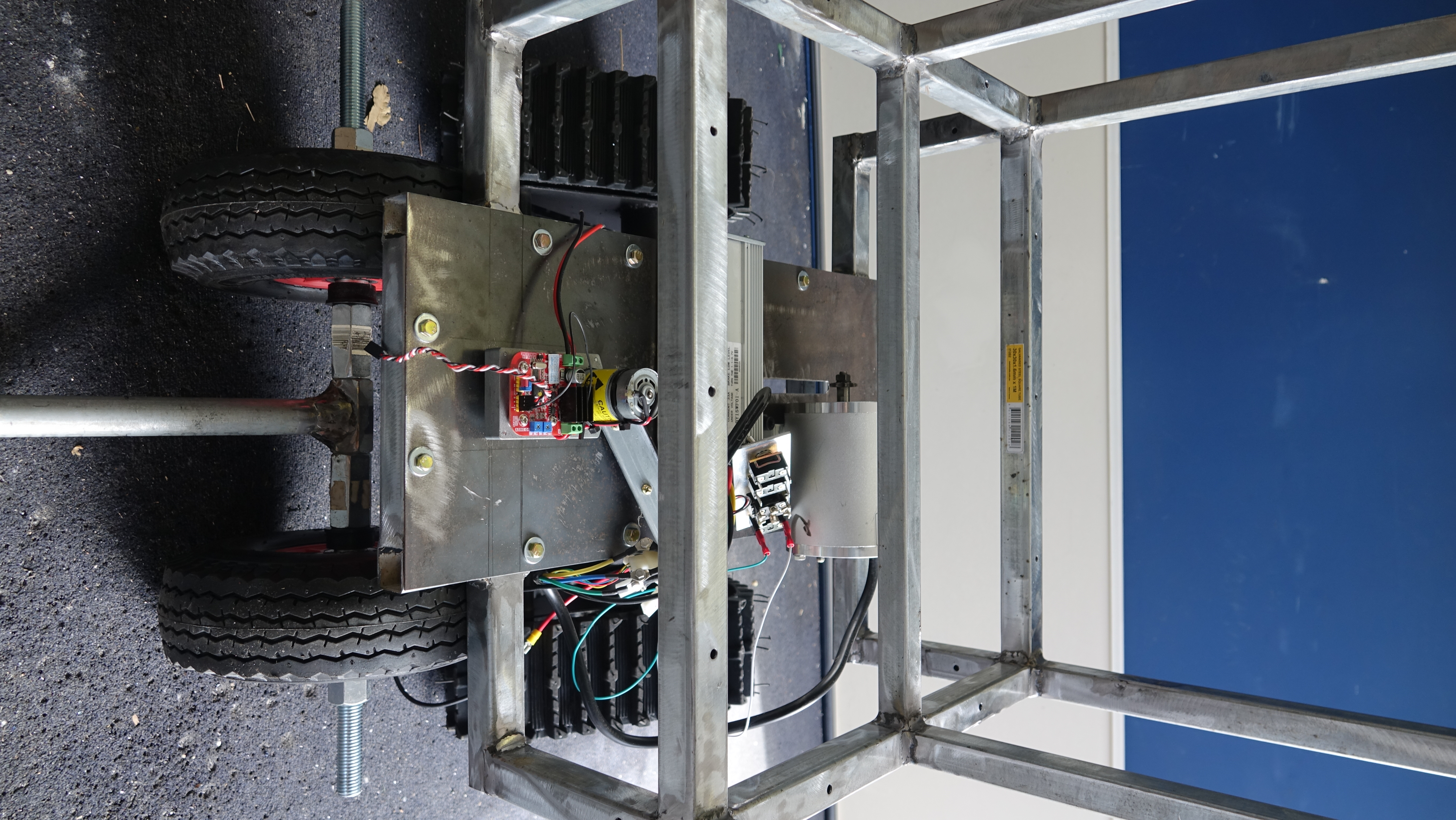
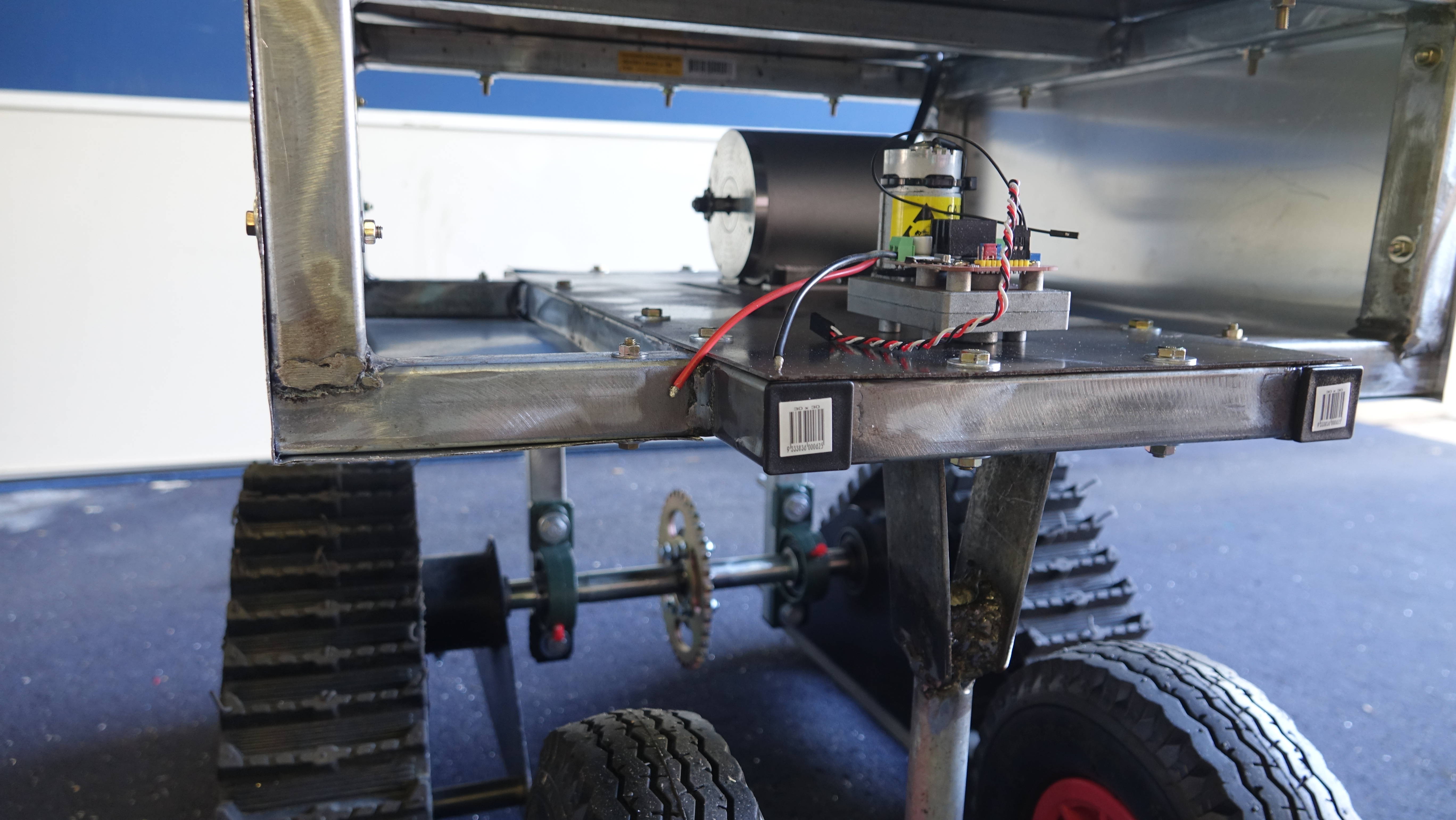
Lower level of the chassis that will support the motor for locomotino and servo motor for steering.

Next level of the chassis that will hold the electric generator and power sources for all the motors.

------------------------------------
Droid Assembly:
Bottom view. Placed the servo motor on the chassis with a supporting bracket bolted against the chassis for strength.
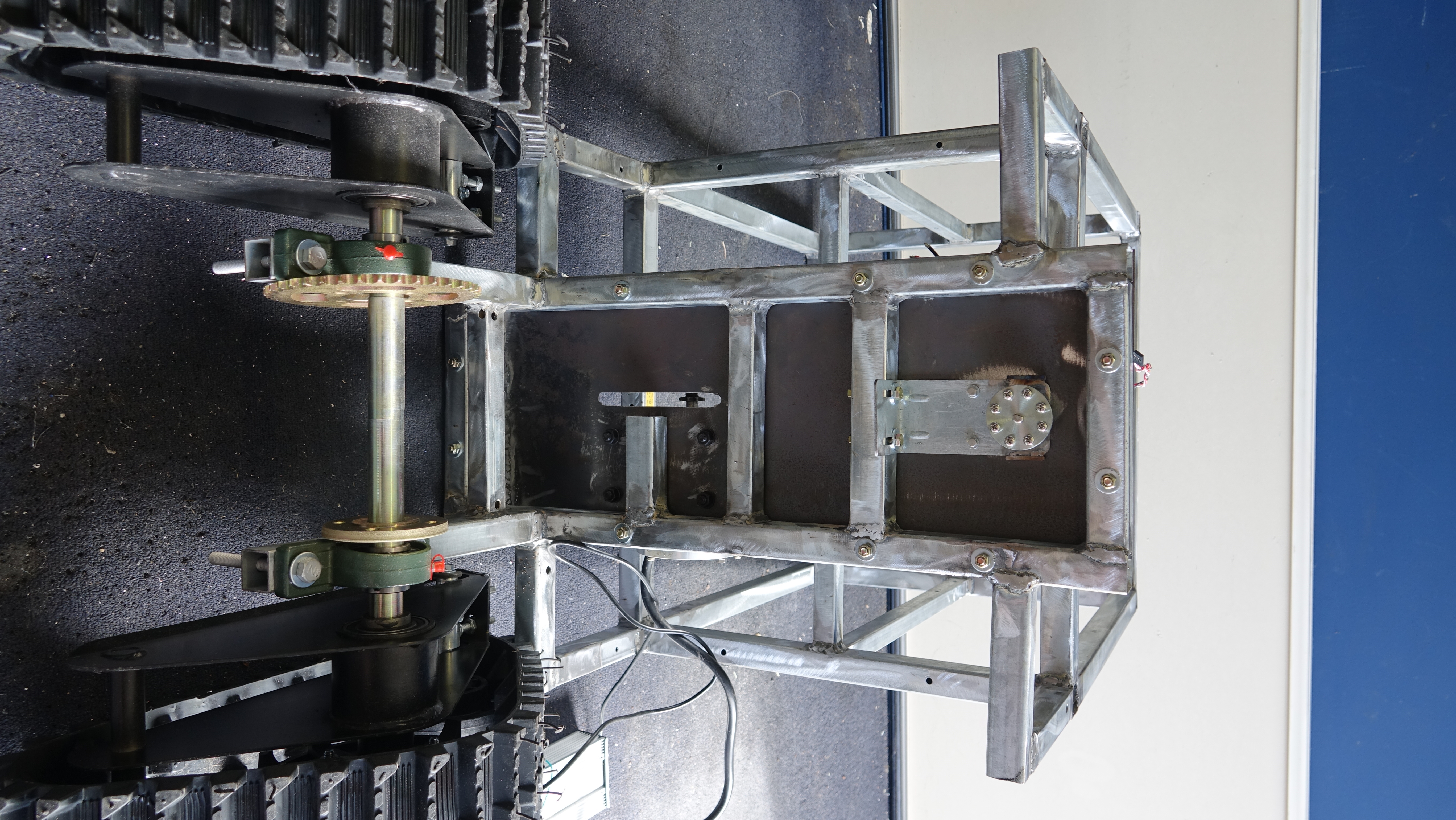
Top view. Welded the shaft to the front wheels axle.
Added the platofrm for the generator and attached the shoulder servo motors.

Finished the front axle shaft and attached to the servo. I'm a bit concerned about the strength of the servo motor's shaft itself, though.

Front wheels assembly.


Arms placed in the body for the time being.

Top deck for the computer added and side panels to protect the locomotion and steering motors attached.

Added the highest deck where the lidar device will sit for environment mapping. Also added brackets for the power sources for all the motors.


Power sources.

Motors.
Added components such as computer, cameras and portable power station.
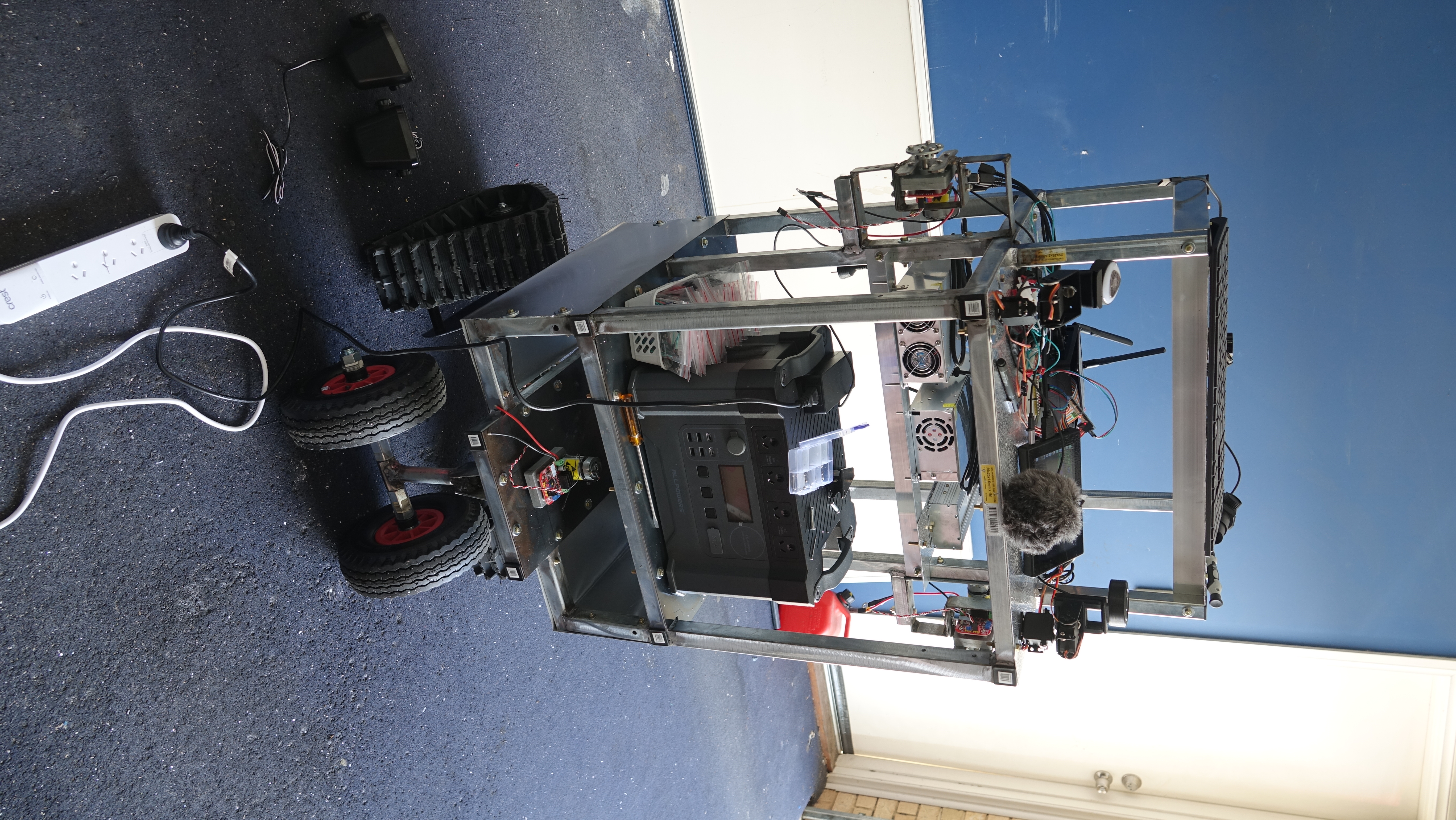
Attached the arms.

Attached side panels and extension actuators for extra reach on the arms, and wired all the components and motors to their respective power sources.


------------------------------------
BAATSHEBA(TM) Copyright(C) Marthinus Botha 2024